

|
~
|
 Small Whiskbroom Imager for trace gases monitoriNG (SWING) The SWING payload is an imaging system designed to be operated from an Unmanned Aerial Vehicle (UAV). One major objective is the mapping of NO2 columns at high spatial resolution allowing to subsample satellite measurements within the extent of a typical ground pixel. Other applications include studying the accuracy of local chemistry and transport models, monitoring ship emissions (NO2 and SO2) and volcanic emissions (SO2). The first UAV test flight was performed in May 2013 near Galati, Romania.
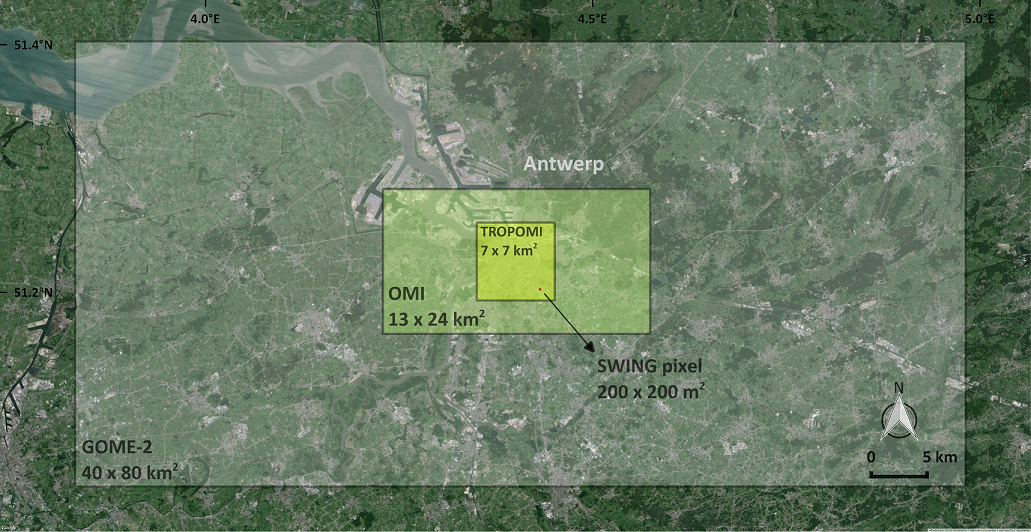
Horizontal extents of nadir-looking atmospheric satellite pixels above a polluted area. A SWING pixel is shown as the red dot inside the TROPOMI pixel. Simulations indicate that a ground resolution of 200 m x 200 m is reachable from 3 km above a polluted place with a whiskbroom system and off the shelf compact spectrometers. This resolution will not be achieved by nadir satellites in the near-future (see their pixel sizes in the above figure). This is a limitation of space-based instruments regarding air quality studies over urban areas where the horizontal gradients are particularly sharp. This motivates airborne experiments for which UAVs offer a cost-effective solution.
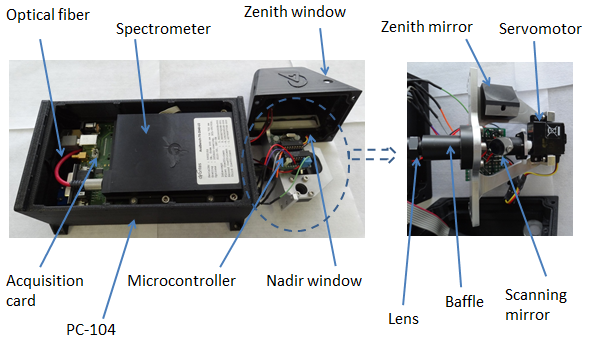
The SWING instrument. The right panel shows the scanning system in more details The SWING instrument was developped at BIRA-IASB. It is based on a compact ultra-violet visible spectrometer and a scanning mirror. The whole system weighs less than 1 kg and uses less than 6 W. The electrically-propelled UAV platform was customly built in parallel by Reev River Aerospace, a spin-off of the University of Galati, Romania.

The Unmanned Aerial Vehicle built by Reev River Aerospace and dedicated to the SWING payload. It is 2.5 m wingspan.
The SWING-UAV observation system was tested in 2013 close to Galati, Romania. It was then operated in the exhaust plume of a large thermoelectric plant during the AROMAT campaign, in September 2014.

SWING on the UAV during the AROMAT-2014 campaign (September 2014). The map below shows the NO2 DSCDs derived from a SWING-UAV flight performed during the AROMAT campaign, on 11 September 2014. Coincident mobile-DOAS measurements were performed during the SWING-UAV flight. The spatial distribution measured with SWING is in agreement with the Mobile-DOAS data and the wind direction.
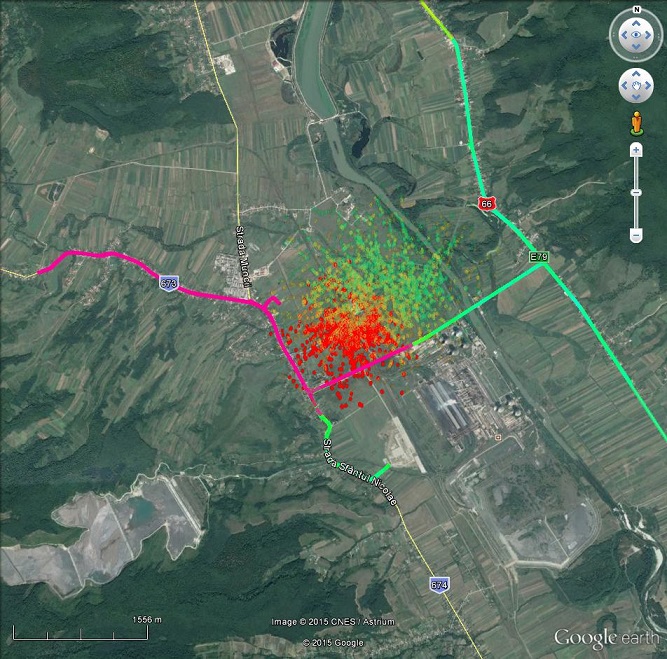
NO2 column map derived from SWING instrument onboard the UAV (11 September 2014), together with time coincident Mobile-DOAS measurements Perspectives The initial objective of monitoring air quality over urban areas from a UAV is not a short term perspective due to security and legal issues. In the near future, we intend to operate SWING from traditional aircraft above cities, as was first tried during AROMAT 2015 from the Uni. Berlin Cessna, and and from UAVs to monitor NO2 and SO2 ship emissions.References Merlaud, A., Constantin, D., Mingireanu, F.,Mocanu, I., Fayt, C., Maes, J. Murariu, G., Voiculescu, M., Georgescu, L., Van Roozendael, M.: Small whiskbroom imager for atmospheric composition monitoring (SWING) from an unmanned aerial vehicle (UAV), Proc. 21st ESA symposium on european rocket and balloon programmes and related research, Thun, Switzerland, June 2013 Acknowledgements and links
The development of SWING and its operation on board a custom built UAV takes place in the framework of a collaboration between BIRA-IASB, the Dunarea de Jos University of Galati (UGAL) and Reev River Aerospace (RRA).
Contact For more information, please contact : Alexis Merlaud or Michel Van Roozendael |

Last update on 09 Aug 2019